A Quick
Generation Method for Key Parameters of Grassland at the Hourly Scale in Ranch
Scale
Wang, D. L.
Key
Laboratory of Land Surface Pattern and Simulation, Institute of Geographic
Sciences and Natural Resources Research, Chinese Academy of Sciences, Beijing
100101, China
Abstract:
Real-time forage distribution data is critical for guiding herders to graze. In
this study, a method of rapidly producing key parameters for the first pasture
of Hulunbuir Youran Animal Husbandry Co., Ltd. based on unmanned aerial
vehicles (UAVs) was proposed. The forage distribution data were acquired in 5
hours and 22 minutes. This method used a fixed-wing UAV to quickly acquire
imagery for the pasture, mosaicked the UAV image titles based the ODM library,
calculated fractional vegetation cover (FVC) based on visible-band difference
vegetation index (VDVI), estimated above ground biomass (AGB) using an
inversion model established based on archived quadrats. Although the accuracy
needs to be verified, this research has certain practical significance for
guiding on-site grazing in natural grasslands.
The dataset for the first pasture of Hulunbuir Youran Animal Husbandry Co.,
Ltd. includes: (1) a orthophoto map, with a size of 21,754Í13,188;
(2) a FVC map, with a size of 21,754Í13,188;
(3) a VDVI map, with
a size of 21,754Í13,188; (4)
a AGB map, with a size of 21,754Í13,188. The
dataset is archived in .shp data format, consists of 16 data files with data
size of 1.23 MB
(Compressed to 1 file with data size of 237 KB).
Keywords: UAV imagery; VDVI; FVC; AGB
DOI: https://doi.org/10.3974/geodp.2023.04.08
CSTR: https://cstr.escience.org.cn/CSTR:20146.14.2023.04.08
Dataset Availability Statement:
The dataset
supporting this paper was published and is accessible through the Digital Journal of Global Change https://doi.org/10.3974/geodb.2024.02.03.V1
or https://cstr.escience.org.cn/CSTR:20146.11.2024.02.03.V1.
1 Introduction
Owing
to less precipitation, the vegetation in the grasslands grows slow and the land
is prone to desertification[1]. Chasing water and grass for grazing
is a way for herders to adapt to the ecological environment of grasslands. By
constantly shifting and searching for new grasslands, the grasslands can be
satisfied the food needs of livestock without damaging grasslands, which
demonstrates the survival wisdom of grassland people to fully utilize the
grasslands and adapt to the environment, as well as their pursuit of harmonious
coexistence between humans and nature[2].
Accurate and
real-time forage distribution data is the basis of choosing the place which
around water and grass to live. However, these forage distribution data are
mainly estimated by naked eyes, thus the geographic coverage and the accuracy
are limited. Satellite-based grassland vegetation monitoring methods can be
used collect the historical and latest data for a wide range at low cost[3],
thus are suitable for continually and dynamically monitoring grasslands at
large scale. However, the satellite data resolution is coarse, the accuracy is
low, and is updated with low frequency, which cannot be directly provided for
on-site grazing. In recent years, unmanned aerial vehicle (UAV) remote sensing
technology has emerged with advantages such as high resolution, low cost, and
flexibility, and has been applied in high-precision vertical structure
parameter extraction of grasslands, above ground biomass (AGB) inversion[4],
and animal population surveys[5, 6]. However, unmanned aerial vehicle
remote sensing products typically needs to be validated using ground measurement
data, the collection and processing of
ground data is time-consuming and laborious, thus cause the failure to produce
UAV remote sensing products for on-site grazing decision-making support.
In this study, a
method of rapidly mapping grassland key parameters, such as VDVI, FVC, and AGB,
was developed after rapidly mosaicking images collected by a fixed-wing UAV.
The timeliness analysis showed that the proposed method for rapidly generating
grassland key parameters could meet the grazing needs and could provide forage
distribution data in a few hours.
2 Metadata of
the Dataset
Experimental
dataset for rapid generation of grassland key parameters from UAV images[7]
is summarized in Table 1. It includes the dataset full name, short name,
authors, geographical region, year of the dataset, spatial resolution, data
format, data size, data files, data publisher, and data sharing policy, etc.
Table 1 Metadata summary of the Experimental dataset for rapid
generation of grassland key parameters from UAV images
|
Items
|
Description
|
|
Dataset full
name
|
Experimental
dataset for rapid generation of grassland key parameters from UAV images
|
|
Dataset
short name
|
UAV_AGB_FVC
|
|
Authors
|
Wang, D. L.
0000-0002-1377-8394, IGSNRR/CAS, wangdongliang@igsnrr.ac.cn
Li, Y. Z., IGSNRR/CAS,
liyuzhe@igsnrr.ac.cn
Zhang, A.
C., IGSNRR/CAS, zhangaochong0013@igsnrr.ac.cn
|
|
Geographical
region
|
First
pasture of Hulunbuir Youran Animal Husbandry Co., Ltd., Hulunbuir city ,
Inner Mongolia autonomous region: 49.318??N?C49.334??N,
119.497??E?C119??543¢E
|
|
Year
|
July 19,
2023, from 14:02 to 14:54
|
|
Spatial
resolution
|
3 cm
|
|
Data format
|
.shp
|
|
|
|
Data size
|
1.23 MB
|
|
|
|
Data files
|
Including a orthophoto image, a FVC map, a VDVI map, and a AGB map
|
|
Foundations
|
Ministry of
Science and Technology of P. R. China (2021YFD1300501); Chinese Academy of
Sciences (XDA23100200)
|
|
Data
publisher
|
Global Change Research Data Publishing & Repository,
http://www.geodoi.ac.cn
|
|
Address
|
No. 11A,
Datun Road, Chaoyang District, Beijing 100101, China
|
|
Data sharing
policy
|
(1) Data are openly available and can be free downloaded via the
Internet; (2) End users are encouraged to use Data subject to
citation; (3) Users, who are by definition also value-added service
providers, are welcome to redistribute Data subject to written permission
from the GCdataPR Editorial Office and the issuance of a Data redistribution
license; and (4) If Data are used to compile new
datasets, the ??ten per cent principal?? should be followed such that Data
records utilized should not surpass 10% of the new dataset contents, while
sources should be clearly noted in suitable places in the new dataset[8]
|
|
Communication and searchable system
|
DOI, CSTR, Crossref, DCI,
CSCD, CNKI, SciEngine, WDS/ISC, GEOSS
|
3 Methods
3.1 Study Area
The
first pasture of Hulunbuir Youran Animal Husbandry Co., Ltd. (formerly
Hulunbuir Yili Animal Husbandry Development Co., Ltd.) is located in the center
of the Hulunbuir meadow steppe, within the territory of Chenbaerhu Banner
(119??30??55.40ʺE, 49??19??05.40ʺN, Figure 1). The climate is temperate semi-arid continental, with an annual average precipitation of 320 mm. Annual
average frost-free days is 100?C114. Annual average temperature is approximately
?C6 ??. Annual
average rainfall is 308 mm. Across the pasture, elevation varies from 595 m to
602 m. The grassland area of the pasture is 5,910 mu (3.94 km2).
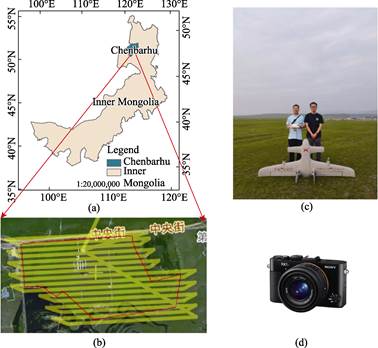
Figure 1 (a) Map of
location of Inner Mongolia, China and the study site in Inner Mongolia; (b) UAV
trajectory; (c) fixed-wing UAV employed in this study; and (d) Sony camera
equipped on the UAV
3.2 UAV Data Collection
Considering
the large area of the pasture, it is impossible to complete the data collection
using a multi-rotor UAV in a day. On July 19, 2023, a customized electric
vertical take-off and landing fixed-wing UAV (Figure 1) was used to collect UAV
imagery. The aircraft weighs 2 kg, has a wing span of 2.2 m, and offers a
payload capacity of up to 3 kg. Its endurance is 120 min flying at an altitude
of 500 m with a load of 600 g. The cruising speed is 72 km/h. The UAS is
equipped with autopilot, enabling fully autonomous navigation from takeoff to
landing when following a predefined flight plan. The UAS was mounted with a
Sony RX1R II camera. The camera was programmed to capture RGB images
simultaneously with approximately 80% forward-overlap and 50% side overlap. The
flight altitude was 300 m above the take-off location. It took 52 minutes to
capture 1072 images with a resolution of about 3 cm. Each image has a size of 7,952 ?? 5,304
pixels. The flight route is shown in Figure 1b.The UAV campaign covered an area
of 6.67 km2.
3.3 UAV Image Mosaicking
ODM
(OpenDroneMap) is an open source library of processing UAV images that can
easily create orthophotos, DEMs, 3D models and point clouds from UAV images[9].
In this study, an image fast-stitching software allowing one-click mosaicking
of UAV images was developed based on the ODM open source library. The original
ODM open source library cannot read UAV images collected in this study, and the
mosaicking process is complex because of
requiring many parameters to be set. This study made adaptations for the input
and output parameters according to UAV data collected in this study. The
software can automatic read images and corresponding positioning and
orientation system (POS) data from the specified file path, and calls the ODM
library to perform image mosaicking. Finally, the orthophoto map is outputted
to the specified output file path. The usability and efficiency of the software
are greatly improved via pre-setting default parameters and one-click
mosaicking.
3.4 VDVI Calculating
Pervious
study showed that VDVIs have excellent performance in distinguishing between
green vegetation and non-vegetation[10]. VDVI is
calculated with the blue, green, and red bands of visible light images[11]:
 (1)
(1)
where,
 ,
,  ,
,  indicates the
band value of red, blue, and green, respectively.
indicates the
band value of red, blue, and green, respectively.
3.5 FVC Calculating
FVC
of the study area is calculated by the pixel binary model[11] based
on the VDVI:
 (2)
(2)
where,
 and
and  indicate the VDVI value of the pure soil pixel and the soil
vegetation pixel, respectively. In this study, the measured results shows that varies from
0.007404 to 0.212268.
indicate the VDVI value of the pure soil pixel and the soil
vegetation pixel, respectively. In this study, the measured results shows that varies from
0.007404 to 0.212268.
3.6 AGB Calculating
Using
the 66 ground measured data collected nearby the study area in August 2015 by
Wang et al.[12], an
empirical equation for estimating biomass based on FVC (R2=0.440,7) is constructed as follows:
 (3)
(3)
4 Data Results and Validation
4.1 Data Composition
The
dataset includes: (1) a orthophoto map, (2) a FVC map, (3) a VDVI map, and (4)
a AGB map, and consists of 4 data files with data size of 1.23 MB.
4.2 Data Products and
Validation
The orthophoto map was generated by the
fast-mosaicking software. VDVI, FVC, and AGB were calculated with Equations (1)?C(3),
respectively. The orthophoto map covered an area of 6.67 km2, as
shown in Figure 2a. VDVI, FVC, and AGB are shown in Figure 2b?C2d.
The visual
interpretation method was used to evaluate the accuracy of the data products.
This study aims to quickly generate key dataset, such as orthophotos,
vegetation cover, and biomass, which are urgently needed for on-site grazing.
On-site grazing typically expects higher requirements for the overall trend
(relative accuracy) and timeliness of the forage distribution data than the
absolute accuracy. Namely, the region where the forage is more abundant is more
expected to know so as to follow. Therefore, the results were validated via
visual inspection. Visual inspection showed that the orthophoto map was
seamless around houses, roads, and fences, and no significant geometric
deformation was found. The overall trend of the vegetation fraction cover and
biomass was consistent with ground observations. As consequence, these products
are accurate enough for on-site grazing.

Figure
2 Orthophoto maps of the first pasture (a), VDVI (b), FVC
(c) and AGB (d)
Analysis of the accuracy of vegetation
coverage and biomass inversion models: The proposed image fast mosaicking
method can be utilized for unmanned aerial vehicle data collected in different
seasons. However, the threshold values of and shown in Equation (2) for vegetation coverage extraction were
measured according to the truth values of soil and vegetation in the UAV
imagery. This threshold values may vary as different lighting conditions and
should be re-measured. In addition, the biomass inversion model was constructed
based on the quadrats collected in July. The grassland vegetation renewal and
litter accumulation speed varies in spring, summer, and autumn, and in winter,
grass completely withers or falls. To insure the accuracy, it is better to
retrain the biomass inversion model shown in the Equation (3) for different
seasons using the quadrats collected in the same month as UAV data or to
construct a new biomass inversion model.
Analysis of advantages and disadvantages
of the proposed method: the proposed method could complete the entire process
from data collection to vegetation coverage and biomass inversion for the first
pasture of Hulunbuir Youran Animal Husbandry Co., Ltd. in less than 5 and a
half hours. The generated key parameters for grasslands have high timeliness
and can be used to guide on-site grazing. The proposed method hold the promise
of developing smart animal husbandry in the future. However, the fixed-wing UAV
used in this article is easily affected by weather and terrains. In cloudy
weather, the UAV can operate under the clouds, but could not work under harsh
weather conditions such as rain, snow, and strong winds. When the terrains of
the operating point is not suitable for the takeoff and landing of fixed-wing
UAVs, the multi-rotor UAV may be used as a substitute. Furthermore, due to the
limitation of the battery capacity of the drone, it is not possible to perform a
long distance flight. For example, the fixed-wing UAV employed in this article could
cover a survey area of approximately 10 km2 at a time, and it is
necessary to replace batteries or using multiple drones for synchronous
operation to ensure the timeliness of data collection for the larger area.
5 Discussion and Conclusion
To
acquire and process UAV imagery for the first pasture of Hulunbuir Youran
Animal Husbandry Co., Ltd. in a few hours, a method for rapidly producing
grassland key parameters based on UAVs was proposed. The main points to boost
efficiency includes: (1) it is impossible to capture the imagery using
multi-rotor UAVs for the first pasture with an area of over 3.94 km2.
Therefore, a new customized fixed-wing vertical take-off and landing (VTOL) UAV
was utilized to capture UAV imagery for the pasture. VTOL UAVs become less
dependent on landing sites by taking off and landing vertically, and reduce the
air resistance during the cruise phase by using fixed-wing horizontal flight in
the air. Therefore, VTOL UAVs have the advantages of both multi-rotor UAVs that
can take-off vertical and fixed-wing UAVs that have a long endurance at a high
speed. Under the same take-off weight, wingspan, battery energy density, and
battery weight, VTOL UAVs have longer endurance times than the other types of
UAVs, and provide an efficient solution for aerial photography in complex
terrain areas such as Inner Mongolian Plateau[13]. (2) To accelerate image
mosaicking, a one-click fast mosaicking software was developed based on the
open source library ODM to generate orthophoto maps. The mosaicking time was
shorten significantly. (3) Finally, FVC was calculated based on VDVIs, and
biomass was estimated using the model established based on archived quadrats.
Due to the absence of field data collection and processing missions, the period
of mapping products was greatly shortened.
As shown in
Figure 2, the VDVI values varying from ?C0.68 to 0.87 fall into five categories.
The regions with VDVI values less than 0.05 are mainly buildings, roads, water
and soil, which are shown in red. The regions with VDVI values from 0.05 to
0.15 are mainly grasslands with low biomass, which are shown in yellow or light
green. The remaining regions with VDVI values higher than 0.15 are mainly
grasslands with high biomass, mostly located away from buildings and near water
resources, which are shown in green. The FVC and AGB value also fall into five
categories, the low-value regions are mostly corresponding to buildings, roads,
and water resources, while the high-value regions mostly overlap with the
grassland with high biomass. It took us 5 hours and 22 minutes to collect the
UAV data and mapping key parameters for grasslands, including 52 minutes for
data collection, 4 hours for image mosaicking, and 30 minutes for mapping
grassland key parameters. The data products can meet the requirements of
herders regarding the relative accuracy and timeliness of forage distribution
data, which has great theoretical significance and expected application
prospects.
The visually
inspection ensures the data products generated in this study have a high
relative accuracy. However, the FVC and AGB generated in this study have not
been validated using the field measurements. We will use field data to
calibrate the products for improving its accuracy in our future studies. In addition,
the image mosaicking algorithm will be optimized to improve the mosaicking
efficiency, and real-time image mosaicking algorithms will be also developed
for on-site grazing and emergency rescue with strong pursuit of the higher
effectiveness.
Acknowledgements
The
authors would like to thank the staff of the first
pasture of Hulunbuir Youran Animal Husbandry Co., Ltd. and Li, Shenlong, Xie, Junkai, and Zhang, Aochong
for their support in this UAV campaign.
Conflicts of Interest
The authors
declare no conflicts of interest.
References
[1]
Li, B. The rangeland
degradation in North China and its preventive strategy [J]. Scientia Agricultura Sinica, 1997, 30(6):
2?C10.
[2]
Tang, G. J., Bao, Q. D. Nomadic
civilization: research on the wisdom of survival and development and its
ecological dimension [J]. Heilongjiang
National Series, 2023(1): 137?C143.
[3]
Shen, H. H., Zhu, Y. K., Zhao,
X., et al. Analysis on the current
situation of grassland resources in China [J]. Chinese Science Bulletin, 2016, 61(2): 139?C154.
[4]
Wang, D., Xin, X., Shao, Q., et al. Modeling aboveground biomass in
hulunber grassland ecosystem by using unmanned aerial vehicle discrete lidar [J].
Sensors, 2017, 17(1): 180.
[5]
Wang, D., Liao, X. H., Zhang,
Y. J., et al. Grassland livestock
real-time detection and weight estimation based
on unmanned aircraft system video streams [J]. Chinese Journal of Ecology, 2021, 40(12): 4099?C4108.
[6]
Wang, D., Song, Q., Liao, X.
H., et al. Integrating satellite and
unmanned aircraft system (UAS) imagery to model livestock population dynamics
in the longbao wetland national nature reserve, China [J]. Science of the Total Environment, 2020, 746: 140327.
[7]
Wang,
D. L., Li, Y. Z., Zhang, A. C. Experimental dataset for rapid generation of
grassland key parameters from UAV images [J/DB/OL]. Digital Journal of Global Change Data Repository,
2024. https://doi.org/10.3974/ geodb.2024.02.03.V1. https://cstr.escience.org.cn/CSTR:20146.11.2024.02.03.V1.
[8]
GCdataPR Editorial Office.
GCdataPR data sharing policy [OL]. https://doi.org/10.3974/dp.policy.2014.05
(Updated 2017).
[9]
Wang, X., Zuo, X. Q. Modeling
and visualization of drone oblique photographic data based on ODM and cesium [J].
Computer Engineering & Software, 2020, 41(4): 124?C129.
[10]
Wang,
X. Q., Wang, M. M., Wang, S. Q., et al.
Extraction of vegetation information from visible unmanned aerial vehicle
images [J]. Transactions of the Chinese
Society of Agricultural Engineering,
2015, 31(5): 152?C158.
[11]
Du, M. M., Noboru, N., Atsushi,
I., et al. Multi-temporal monitoring
of wheat growth by using images from satellite and unmanned aerial vehicle [J].
International Journal of Agricultural and
Biological Engineering, 2017, 10(5): 1?C13.
[12]
Zhou, J., Zhang, K., Du, T.
Research on vegetation cover variations in reservoir areas based on satellite
remote sensing: a case study of Sanhekou Reservoir Area [J]. Water Resources and Hydropower Engineering,
2023, 1(1): 1?C12.
[13]
Wang, Y., Ma, L., Wang, Q., et al. A lightweight and high-accuracy
deep learning method for grassland grazing livestock detection using UAV imagery
[J]. Remote Sensing, 2023, 15(6):
1593.