Visual Perception Location Dataset of Gubeikou
Great Wall
Li, Z. H.1 Li, R. J.1,2,3* Sun, B. L.1 Li, J. H.1
1. College of Geographical Sciences, Hebei Normal
University, Shijiazhuang 050024, China;
2. GeoComputation and Planning Center of Hebei Normal University,
Shijiazhuang 050024, China;
3. Hebei Technology Innovation Center for Remote Sensing
Identification of Environmental Change, Shijiazhuang 050024, China
Abstract: The
Great Wall is a crucial visual landscape resource with multiple meanings such
as history, culture, and morphological aesthetics. Visual perception
calculation and analysis is an important approach to exploring the value of the
landscape resources of the Great Wall and presenting and explaining the
multidimensional significance of the Great Wall. In this dataset, by designing
the semantic feature point extraction and coding rules of the Great Wall
landscape system, the landscape semantic feature points are generated based on
the ontology resources of the Gubeikou Great Wall and ALOS 12.5m DEM data, and
the viewshed raster is obtained by analyzing each feature point. Then, based on
the landscape visual perception location information model, the landscape
visual perception location dataset of the Gubeikou Great Wall was constructed
using the NetCDF multidimensional data format. The dataset consists of three
parts: (1) the subset of semantic feature points data selected manually, (2)
the subset of semantic feature points selected by a program automatically, and
(3) verification points. Data subsets (1) and (2) include the vector data of
ontology features and semantic feature points of the Gubeikou Great Wall and
the visual perception location data of the Gubeikou Great Wall landscape. The
dataset is stored in .shp and .nc formats, and it consists of 64 data files
with a total data size of 6.58 GB (compressed into 1 file, 63.8 MB).
Keywords: visual perception location; landscape semantic feature points; the Great
Wall; NetCDF
DOI: https://doi.org/10.3974/geodp.2024.01.04
CSTR: https://cstr.escience.org.cn/CSTR:20146.14.2024.01.04
Dataset Availability Statement:
The dataset
supporting this paper was published and is accessible through the Digital Journal of
Global Change Data Repository at: https://doi.org/10.3974/geodb.2024.04.03.V1 or https://cstr.escience.org.cn/CSTR:20146.11.
2024.04.03.V1.
1 Introduction
Cultural
heritage is an important carrier of history and culture and a witness to the
development of human history. In recent years, the digitalization[1]
and activation[2] of cultural heritage has increasingly become a
focus of attention both domestically and internationally, while the ontological
value of cultural heritage and the experience value it brings remain at the
core. In July 2019, the 9th meeting of the Commission for Deepening Overall
Reform of the CPC Central Committee deliberated and adopted the Construction
Plan for the Great Wall, Grand Canal, and Long March National Cultural Park,
marking the official launch of the construction of the national cultural park[3].
The Great Wall is a linear cultural heritage with a large volume, long time
span, and strong ability in China, which plays an important role in promoting
economic development, cultural exchange, as well as national integration in the
Great Wall region[4]. The spatial combination and configuration of
the main landscapes of the Great Wall, such as the wall, the enemy station, the
beacon tower, the Guan fort, etc., has great aesthetic and cultural
significance, while the ingenious integration with the environmental background
further makes the Great Wall a valuable visual landscape resource. Vision is a
fundamental condition for landscape perception[5]. To realize high-quality construction and development of the
Great Wall National Cultural Park, it needs to comprehensively explore the
visual perception location that can experience the significance of the Great
Wall landscape. However, traditional field investigation methods are difficult
to comprehensively search for visual landscape perception locations with rich
semantic information, and existing research has not yet generated dataset
products with landscape visual perception location information from a resource
perspective.
The Gubeikou
Great Wall is located in the southeast of Gubeikou Town, Miyun District,
Beijing, and in the southern part of Luanping County, Chengde City. It includes
four sections of Simatai, Jinshanling, Panlongshan, and Wohushan, and it has
the characteristics of broad vision, dense enemy towers, unique landscapes,
sophisticated craftsmanship, intact original appearance, etc., with high value
in visual landscape resources. In this dataset, the landscape ontology of the
Gubeikou Great Wall and its visual perception location information were
investigated and integrated. The landscape
ontology resource of the Gubeikou Great Wall was expressed digitally in the
form of landscape semantic feature points, and its landscape semantic attribute
information was expressed by coding; Meanwhile, the visual perception location
information of the Gubeikou Great Wall was integrated and stored in the NetCDF
multidimensional raster data format to establish the visual relationship
between visual perception location and landscape semantics and to integrate
target landscape, perceived location, and visual state information. The dataset
provides data for heritage protection and integrated development of culture and
tourism, and it supports the value mining of landscape resources based on
visual perception.
2 Metadata of the Dataset
The metadata of the Landscape visual perception
location dataset of Great Wall in Gubeikou[6] is summarized in
Table 1. It includes the dataset??s full name, short name, authors, geographical
region, spatial resolution, data format, data size, data files, data publisher,
data sharing policy, etc.
3 Methods
3.1 Data Sources
(1) The data on the Great
Wall landscape resources were collected from the Ming Great
Table 1 Metadata summary of the Landscape
visual perception location dataset of Great Wall in Gubeikou
|
Items
|
Description
|
|
Dataset full name
|
Landscape visual
perception location dataset of Great Wall in Gubeikou
|
|
Dataset short
name
|
Gubeikou_LVPLM
|
|
Authors
|
Li, Z. H. JTU-3036-2023,
College of Geographical Sciences, Hebei Normal University, lizhhg@163.com
Li, R. J. JZD-9102-2024, College of Geographical Sciences, Hebei Normal
University, lrjgis@hebtu.edu.cn
Sun, B. L. JYP-6636-2024, College of Geographical Sciences, Hebei Normal
University,
stayreal9523@163.com
Li, J. H. JYP-6677-2024, College of Geographical Sciences, Hebei Normal
University,
ljh06524@163.com
|
|
Geographical
region
|
Gubeikou Great
Wall along the 5 km range grid
|
|
Spatial
resolution
|
12.5 m
|
|
Data format
|
.shp, .nc
|
|
|
|
Data size
|
63.8 MB (compressed)
|
|
|
|
Data files
|
Gubeikou Great
Wall ontology features and landscape semantic feature point vector data,
landscape visual perception location multi-dimensional raster data
|
|
Foundations
|
Natural Science Foundation
of Hebei Province(D2023205011); National Natural Science Foundation of China
(41471127)
|
|
Computing
environment
|
ArcGIS
|
|
Data publisher
|
Global Change Research Data Publishing & Repository,
http://www.geodoi.ac.cn
|
|
Address
|
No. 11A, Datun
Road, Chaoyang District, Beijing 100101, China
|
|
Data sharing policy
|
(1) Data are openly available and can be free downloaded via the
Internet; (2) End users are encouraged to use Data subject to citation; (3) Users, who are by definition also
value-added service providers, are welcome to redistribute Data subject to written permission
from the GCdataPR Editorial Office and the issuance of a Data redistribution license; and (4) If Data are used to compile new datasets, the ??ten per cent
principal?? should be followed such that Data
records utilized should not surpass 10% of the new dataset contents, while
sources should be clearly noted in suitable places in the new dataset[7]
|
|
Communication and
searchable system
|
DOI, CSTR, Crossref, DCI, CSCD, CNKI, SciEngine,
WDS/ISC, GEOSS
|
Wall
heritage data provided by the National Cultural Relics Census and the Great
Wall station volunteer geographic information platform. The
research area covers 26.49 km of the Great Wall, including 154 enemy stations,
13 beacon towers, 1 shop house, 2 water passes, and 1 Guan fort.
(2) The DEM data
was derived from NASA??s Earthdata website,
and ALOS satellite data with a spatial resolution of 12.5 m was used.
(3) Environmental
background and geographical elements were adopted from China??s 1:100,0000 basic
geographic dataset.
(4) The
verification data were collected by the project team through a field survey.
3.2 Dataset Organization
Framework
The
Landscape Visual Perception Location Model (LVPLM)[8] was employed
to organize the dataset, and each landscape semantic feature point was taken as
a basic visual perception location calculation unit. The data result was stored
in the NetCDF multidimensional data format. The organization model of the
dataset is expressed in Equation (1).
LVPLM=f
(X, Y, Points) (1)
where,
X and Y denote the location dimensions of the dataset, and the
dimension values are the X and Y coordinates of the landscape visual perception
location. Points represents the feature point dimension of the dataset,
and the dimension value is the encoding of semantic feature points. The three
dimensions of X, Y, and Points provide the
spatial location and feature point coding information, and the data variables
provide the visual perception information. Based on this, bidirectional queries
of landscape semantic feature points and their visual perception state can be
realized, thereby establishing the correlation between the landscape of the
Gubeikou Great Wall and the visual perception location.
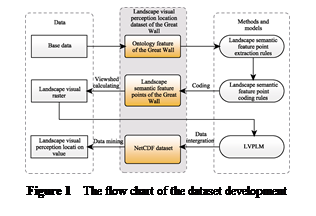
3.3 Data Procession
First,
landscape ontology resource data was generated based on basic data
interpretation, and the vector dataset of landscape semantic feature points of
the Gubeikou Great Wall was constructed following feature point extraction and
coding rules: including the wall line of the Gubeikou Great Wall and the point
elements of the Great Wall itself (beacon tower, etc.), and the landscape
semantic feature points in shapefile data format. Then, each landscape semantic
feature point was calculated from the perspective, and the obtained visual grid
was integrated and organized using the LVPLM, and the Great Wall landscape
visual perception location dataset was constructed based on the NetCDF
multidimensional raster data structure. Finally, the landscape visual
perception information can be extracted from the dataset. The data research and
development process is illustrated in Figure 1.
 (1) The generation of
ontology data of the Great Wall landscape resources
(1) The generation of
ontology data of the Great Wall landscape resources
Based on the distribution vector of the Great
Wall Station and the attribute information of the national cultural heritage
survey data, and taking the ArcGIS Earth 3D terrain environment background as a
refe-
rence, the author cooperated
in interpreting, correcting, and generating high-precision land-
scape
ontology resource data of the Great Wall at Gubeikou. It included the wall line
data and the ontology feature point data of the Great Wall (such as enemy
towers, beacon towers, etc.). Specifically, the wall line of the Great Wall was
the center line of the wall, while the main landscape features of the enemy
tower, beacon tower, and other features were the geometric center point of the
features, and the height was set according to the height of the landscape
features.
(2) Extraction and
coding of semantic feature points of the Great Wall
Landscape semantic
feature points are the foundation of the digital representation of visual
landscape resources. According to the comprehensive idea of cartography,
landscape ontology can be abstracted as landscape semantic feature points that
can maximize the authenticity of landscape semantics[9?C11]. Then, the extraction rules of
semantic feature points were designed following the landscape resource
classification and semantic feature point selection rules proposed by Guo[12].
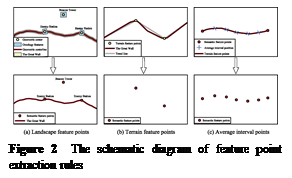
According to the
purpose of abstracting the morphological characteristics of the Great Wall as
much as possible and fully expressing the landscape semantics, semantic feature
points were extracted from the wall at an average interval of 30 m, and the
points were taken from the places where terrain features changed significantly
along the wall extension direction. The height of the feature points was taken
from the average height of the Great Wall in the Gubeikou section at 6 m.
Following the above principles, the feature points were divided into landscape
feature points, terrain feature points, and average interval points using
different extraction methods: (1) Landscape feature points, i.e., beacon towers,
enemy stations, and other Great Wall ontology features, where the point data in
the ontology features were directly used, all reserved because of the
importance of its function and visual state in principle; (2) Terrain
feature points were extracted at the point where the wall line of the Great
Wall varied significantly in the plane or elevation direction, and encrypted
points were taken in the extension direction. In the automatic extraction
method of the program, the 3D Douglas-Peucker algorithm was used to screen out
the terrain feature points on the wall line of the Great Wall[13],
and a tolerance value of 15 m was set for calculation and extraction; (3) Average
interval points, the average interval distance of 30 m was used to supplement
the points on the wall line of the Great Wall. The extraction method is
illustrated in Figure 2. According to the selection rules of semantic feature
points, the landscape semantic feature points of each section of the Gubeikou
Great Wall were extracted through artificial discriminant extraction and
programmed automatic extraction respectively.
 After feature points were extracted, the hierarchical classification coding method was
employed to encode all landscape semantic feature points in the system,
and the basic coding structure was designed as 4-digit codes including section
code, location sequence code, structural order code, and element type code.
After feature points were extracted, the hierarchical classification coding method was
employed to encode all landscape semantic feature points in the system,
and the basic coding structure was designed as 4-digit codes including section
code, location sequence code, structural order code, and element type code.
(3) Landscape visual perception
calculation
Based on DEM data, all
landscape semantic feature points constituting the landscape system of the
Great Wall of Gubeikou were calculated and analyzed in sequence in terms of the
visual field. The whole research area and 10 km were calculated as visual field
ranges respectively, and then visual field grids of different visual field
ranges of each landscape semantic feature point were generated. It is a set of
raster pixels that can cover the entire calculation area. The value of each
raster pixel is 1 or 0, respectively representing the visible or invisible
state of a certain landscape semantic feature point at that location. The
spatial distribution information of visual perception location can be obtained
based on the result of landscape visual perception calculation.
(4) Landscape visual
perception location data integration based on LVPLM
According to the organization structure
of the LVPLM model, the ??raster to NetCDF?? tool in the ArcGIS multidimensional
toolbox was utilized to integrate all the visual raster layers generated by
calculation into .nc multidimensional data, and the visual perception location
dataset of Gubeikou Great Wall landscape was obtained.
4 Data Results and Validation
4.1 Data Composition
The
dataset consists of three parts: (1) The subset of semantic feature points
selected manually; (2) The subset of semantic feature points selected by
program automatically; (3) Verification points (archived in three folders
called ??Gubeikou_LVPLM_Manually?? ??Gubeikou_LVPLM_Automatically_10km??, and
??Gubeikou_LVPLM_Validation_Data??). Data subsets (1) and (2) include vector data
of ontology features and semantic feature points of the Gubeikou Great Wall
archived in the .shp format, and visual perception location data of the
Gubeikou Great Wall landscape stored in the .nc format.
4.2 Data Products
(1)
Semantic feature points of the Gubeikou Great Wall landscape
A total of 941
semantic feature points were extracted from the
Gubeikou Great Wall through manual selection, and 944 semantic feature points
were extracted through program selection. The overall spatial distribution and
extraction results of feature points (manually selected) are shown in Figure 3
(for ease of expression, the feature points on the figure are extracted and
displayed).

Figure 3 The extraction results of
semantic feature points from the Gubeikou Great Wall landscape
Each feature point
was recorded with a unique code carrying its landscape semantic information
(Table 2). Under the range scale of the current dataset, each landscape feature
was expressed by one feature point, so the structural order code (the fifth
digit encoded) was all 1. If it is necessary to add feature points to the
landscape feature in the future, it can be
sequenced according to the structural order code.
Table 2 The coding of the landscape semantic feature
points of the Gubeikou Great Wall (part)
|
Sample code
|
Section
(code)
|
Location sequence
|
Structural
sequence
|
Feature type
(code)
|
Coding semantic parsing
|
|
100111
|
Simatai (1)
|
001
|
1
|
Wall (1)
|
Wall feature point of
location No.1 in Simatai subsystem
|
|
101511
|
Simatai (1)
|
015
|
1
|
Wall (1)
|
Wall feature point of
location No.15 in Simatai subsystem
|
|
110412
|
Simatai (1)
|
104
|
1
|
Enemy Station (2)
|
Enemy Station feature point
of location No.104 in Simatai subsystem
|
|
211014
|
Jinshanling (2)
|
110
|
1
|
Shop House (4)
|
Shop House feature point of
location No.110 in Jinshanling subsystem
|
|
220613
|
Jinshanling (2)
|
206
|
1
|
Beacon Tower (3)
|
Beacon Tower feature point of
location No.206 in Jinshanling subsystem
|
|
220716
|
Jinshanling (2)
|
207
|
1
|
Guan Fort (6)
|
Guan Fort feature point of
location No.207 in Jinshanling subsystem
|
|
301215
|
Panlongshan (3)
|
012
|
1
|
Water Pass (5)
|
Water Pass feature point of
location No.12 in Panlongshan subsystem
|
|
317911
|
Panlongshan (3)
|
179
|
1
|
Wall (1)
|
Wall feature point of
location No.179 in Panlongshan subsystem
|
|
400513
|
Wohushan (3)
|
005
|
1
|
Beacon Tower (3)
|
Beacon Tower feature point of
location No.5 in Wohushan subsystem
|
|
403312
|
Wohushan (3)
|
033
|
1
|
Enemy Station (2)
|
Enemy Station feature point
of location No.33 in Wohushan subsystem
|
(2) Overall statistical
characteristics of visual perception location of the Gubeikou Great Wall
landscape
The dataset integrated
the overall visual perception location information of the landscape system.
Through data aggregation, the visual perception metric value of each spatial
location unit can be obtained, which reflects the number of overall visual
feature points of the landscape system at the visual perception location. Based
on this, the overall statistical feature analysis of landscape visual
perception can be conducted. The more the number of semantic feature points of
the visual landscape, the higher the value of the potential perceived location,
and vice versa. The spatial distribution of the number of overall feature
points in the visual perception location is illustrated in Figure 4.
(3) Visual location of
the Gubeikou Great Wall landscape
Based on the visual
perception location dataset of the Gubeikou Great Wall landscape, the following
information can be extracted: (1) The visual perception location of specific
semantic feature points, i.e., the visual distribution information of target
feature points; (2) The visual semantic feature points of a specific location,
i.e., the semantic feature points that can be seen at a specific observation
point.
The representative
landscape Maoyan Tower and Small Jinshan Tower were selected to identify the
spatial distribution characteristics of their visual locations. As shown in
Figure 4(e), the Maoyan Tower located in the Simatai section has a large and
more concentrated landscape visual location range, which is mainly distributed
in the southwest direction; However, the visual location of the Small Jinshan
Tower in the Jinshanling section is scattered inside and outside the
Great Wall, as demonstrated in Figure 4(d). Then, observation points were selected
on the south and north sides of the Jinshanling section of the Great
Wall, and the visual feature points of the area can be obtained based on the
visual perception location information contained in the dataset, as shown in
Figure 4(b) and Figure 4(c).
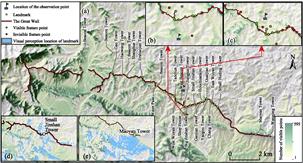
Figure 4 The spatial distribution of the overall
feature points in the Gubeikou Great Wall
4.3 Data Validation
The
project team went to Gubeikou Great Wall area from August 9 to 13, 2023 to
verify the accuracy of the calculation results. Considering the characteristics
of the Great Wall landscape, the spatial distribution of visual perception
location, and the objective of accuracy verification, three types of
verification areas were set up: the verification area on the Great Wall, the
centralized verification area along the Great Wall, and the random verification
area. In the accuracy verification, the consistency between the visual
perception in real scenes and the visual perception calculation results was
evaluated, and then the accuracy of the visual perception location dataset of
the Great Wall landscape was evaluated.
(1) Selection of
verification area and data collection of observation points
The verification
area on the Great Wall was a verification area composed of observation points
located on the Great Wall. The verification area was constructed by setting
observation points in the Jinshanling section. The verification area along the
Great Wall was selected in the south of the Simatai section, and a total of 11
regular squares of 500 m??500 m were set up. Observation points in the random
verification area were randomly selected along the traffic lines and villages
on both sides of the Great Wall at Gubeikou (Figure 5).
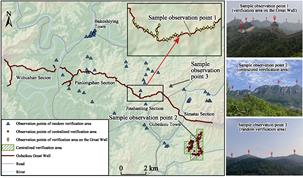
Figure 5 The
distribution of verification areas and observation points in the Gubeikou Great
Wall
Table 3 The field observation information at the Gubeikou
Great Wall (part)
|
Time
|
Location
|
Reachable
|
Code
|
Latitude
(N)
|
Longitude
(E)
|
Factors
affecting visibility
|
Semantic feature
point code of visible features
|
Number of visible
features
|
|
2023/8/9 12:40
|
On the
wall
|
Y
|
J16
|
40??40ʹ44.59ʺ
|
117??15ʹ4.10ʺ
|
None
|
206112; 205512; 205012;
204712
|
4
|
|
2023/8/9 11:41
|
On the
wall
|
Y
|
J23
|
40??40ʹ39.20ʺ
|
117??14ʹ44.75ʺ
|
Terrain
|
206712; 207212; 207912;
211014; 211112; 211512; 212112; 212313; 213212; 213612; 214012; 214312; 214812;
215212; 215712
|
15
|
|
2023/8/9 12:14
|
On the
wall
|
Y
|
J19
|
40??40ʹ40.36ʺ
|
117??14ʹ59.27ʺ
|
Vegetation
|
201212; 202112; 202312;
202912; 203612; 204712; 205012; 205512
|
8
|
|
2023/8/11 15:49
|
Beyond the wall
|
Y
|
A742-B19
|
40??40ʹ24.18ʺ
|
117??16ʹ51.20ʺ
|
Vegetation;Weather
|
114212; 115112; 115712;
113612; 112812
|
5
|
|
2023/8/12 13:54
|
Beyond the wall
|
Y
|
A1059-1
|
40??42ʹ3.59ʺ
|
117??14ʹ25.72ʺ
|
Vegetation;
Buildings;
Terrain
|
None
|
0
|
|
2023/8/12 10:54
|
Beyond the wall
|
Y
|
A420-7
|
40??38ʹ37.25ʺ
|
117??17ʹ23.94ʺ
|
Vegetation;
Buildings
|
100512; 102212; 103812
|
3
|
|
2023/8/11 11:19
|
Beyond the wall
|
Y
|
A735-1
|
40??40ʹ15.72ʺ
|
117??14ʹ24.61ʺ
|
Weather
|
210312
|
1
|
|
2023/8/10 17:11
|
Beyond the wall
|
N
|
A1237-B10
|
N/A
|
N/A
|
N/A
|
N/A
|
N/A
|
The project team
members first went to the verification area to collect observation points. If
the target point was not reachable due to objective factors such as terrain,
land cover, or personnel safety, the point was recorded as inaccessible; If the
target point was reachable, after the observation point was reached, the
current coordinates were located through a handheld GPS instrument, and the
visual situation of the single landscape of the Great Wall at the current point
was recorded by taking photos (the photos contained the azimuth and other
information), the 3D terrain view and the vector
data of the single landscape in the verification area were loaded with
OvitalMap software, and the semantic feature point code of all visible
landscape in each photo was compared for identification. Finally, the above
information, observation point code, factors affecting the visibility and other
information were filled into the preset field observation information
collection form for submission and summary (Table 3). After data collation, a
total of 137 effective observation points were obtained in the verification
work, including 27 observation points in the verification area onthe Great
Wall, 60 observation points in the centralized verification area, and 50
observation points in the random verification area.
(2) Accuracy
verification methods and results
The quantitative
and content consistency of all observation points can be obtained by comparing
the matching degree between the field observation data of each observation
point and the feature point information of the visible single landscape (such
as beacon tower, enemy station, etc.) at the corresponding location in the
dataset in terms of the number of visible feature points and the corresponding
relationship between the visible feature points[8]. Then, the
dataset validation results were obtained by calculating the average
quantitative and content fit according to different validation area types
(Table 4). The average total quantity coincidence and content coincidence were
76.37% and 70.69%, respectively. Meanwhile, it was found that DEM accuracy,
landscape preservation status, and construction and vegetation occlusion all
affected the accuracy of the dataset. The verification results suggest that the
dataset results are consistent with the field observation results, and the
landscape visual perception location information of the dataset has high
reliability.
Table 4 The verification results of the Gubeikou
Great Wall LVPLM dataset
|
Type of verification area
|
Number of observation points
|
Number of fit averages
|
Content fit average
|
|
Verification area on
the Great Wall
|
27
|
94.55%
|
76.32%
|
|
Centralized verification area
|
60
|
64.28%
|
62.29%
|
|
Random verification area
|
50
|
81.07%
|
77.73%
|
|
Overall
|
137
|
76.37%
|
70.69%
|
5 Discussion and Conclusion
In
this dataset, the landscape resources of the Gubeikou Great Wall were digitally
expressed in the form of vector geographic feature points, and the landscape
semantic information of each feature point was recorded by coding, so as to
obtain landscape ontology data of the Gubeikou Great Wall. Based on the raster
data obtained from perspective analysis and the calculation of landscape
semantic feature points, the location information of landscape visual
perception was organized and stored in an integrated way based on the LVPLM
model, and the correlation between visual perception location and landscape
semantic feature points was established in the NetCDF multidimensional data
format. In this approach, the bidirectional query from feature points to their
visual location and from specific locations to corresponding visual feature
points can be realized. Field verification analysis results indicate that the
dataset??s results have good reliability. Therefore, this dataset not only
provides semantic feature point data that can characterize the landscape system
characteristics of the Gubeikou Great Wall for researchers engaged in
landscape planning and Great Wall research, but also provides multi-dimensional
landscape visual perception location raster data with encoded semantic sequence
information. With this dataset, further landscape visual perception information
mining can be conducted to evaluate visual perception effects, select potential
high-quality landscape perception locations, analyze different locations of the
visual Great Wall landscape combination mode, and perform other application
practices, thereby assisting in high-quality tourism spatial planning and the
construction of the Great Wall National Cultural Park.
Author Contributions
Li,
Z. H. successfully implemented the algorithm for automatic feature point
extraction and data integration, and wrote the data paper. Li, R. J. formulated
the overall development plan for the dataset and designed its organizational
structure, while also being responsible for revising and approving the data
paper. Sun, B. L. participated in producing and validation of the dataset. Li,
J. H. contributed to designing and validating the data validation.
Conflicts
of Interest
The
authors declare no conflicts of interest.
References
[1]
Ognjanović
Z,Marinković B, Šegan-Radonjić M, et al. Cultural Heritage Digitization
in Serbia: Standards, Policies, and Case Studies [J]. Sustainability, 2019, 11(14): 3788.
[2]
Wu, B. H., Wang, M. T. Heritage
revitalization, original site value, and presentation methods [J]. Tourism Tribune,
2018, 33(9): 3?C5.
[3]
Li, F., Zou, T. Q. National
Cultural Park: logic, origins and implications [J]. Tourism Tribune, 2021, 36(1): 14?C26.
[4]
Cheng, R. F., Xu, C. C. A study
on the spatial structure layout and development strategy of the cultural
tourism belt of the Great Wall [J]. Economy
and Management, 2022, 36(1): 58?C64.
[5]
Li, S., Zhu, C. Resarch on
landspace evaluation of engineering universities based on visual perception
[J]. Areal Research and Development,
2022, 41(3): 49?C54, 74.
[6]
Li, Z. H., Li, R. J., Sun, B.
L., et al. Landscape visual
perception location dataset of Great Wall in Gubeikou [J/DB/OL]. Digital Journal of Global Change Data
Repository, 2024. https://doi.org/10.3974/geodb.2024.
04.03.V1. https://cstr.escience.org.cn/CSTR:20146.11.2024.04.03.V1.
[7]
GCdata PR Editorial Office.
GCdataPR data sharing policy [OL]. https://10.3974/dp.policy.2014.05 (Updated in 2017).
[8]
Sun, B. L., Guo, F. H., Li, R.
J., et al. Linear cultural heritage landscape visual perception location
model and demonstration. Progress in Geography, 2024, 43(1): 80?C92.
[9]
Ye, Y. J., Li, R. J., Fu, X.
Q., et al. A DEM based semantic
perception of culture landscape in the tourist destination of the western Qing
tombs [J]. Journal of Geo-information
Science, 2012, 14(5): 576?C583.
[10]
Li, R. J., Gu, F., Guo, F. H., et al. Cultural landscape perception
degree model and perception function division based on DEM of traffic line: a
case study of Zijingguan Great Wall [J]. Scientia
Geographica Sinica, 2015, 35(9): 1086?C1094.
[11]
Guo, F. H., Cheng, L. P., Fu,
X. Q., et al. Calculation model of
tourist??s landscape perception degree within destination based on grid data
structure [J]. Areal Research and
Development, 2018, 37(1): 125?C130.
[12]
Guo, F. H., Sun, B. L., Li, J.
H., et al. The Great Wall visual
landscape resources and its perception location calculation method [J]. Geography and Geo-Information Science,
2022, 38(6): 9?C16.
[13]
Fei, L. F., He, J., Ma, C. Y., et al. Three dimensional Douglas-Peucker
algorithm and the study of its application to automated generalization of DEM
[J]. Acta Geodaetica et Cartographica
Sinica, 2006(3): 278?C284.