UAV Grazing Research
Zhang, Z. Y.1, 2 Wang, D. L1,*
1. Key Laboratory of Land Surface Pattern and
Simulation, Institute of Sciences and Natural Resources Research, Chinese
Academy of Science, Beijing 100101, China;
2. Geoscience Institute, Yangtze University, Wuhan
430100, China
Abstract: UAVs
have the characteristics of flexibility and ease of operation and have become
an important tool for breaking terrain barriers, safely and efficiently
obtaining massive amounts of surface data, and low-altitude and near-Earth
observations in research such as geographic information science and ecology. In
addition, UAVs have been applied in grassland animal husbandry management and
assisted grazing. The research first systematically reviewed the progress of
UAV grazing-related technologies and the typical application cases of
UAV-assisted grazing in China and abroad. Then, combined with the UAV grazing livestock
experiment carried out by the research team in Hulunbuir, China, the grazing
effect of the UAV on different herds in different driving positions of the herd
was analyzed. The preliminary results of the experiment show that UAVs have
great application potential in assisting grazing and that the grazing effect of
UAVs equipped with megaphones is better than that of UAVs without megaphones.
Finally, the existing problems and challenges of UAV grazing are discussed, and
the future development directions are proposed. The analysis of UAV flight
height, attitude, noise, and other factors influencing the herd driving effect
is conducive to the formulation of standardized UAV herding livestock standards
and can also provide a theoretical reference for responding to the demand for
highly intelligent UAV grazing in the grassland environment.
Keywords: UAV
grazing; typical application cases; the effect of supplementary grazing;
loudspeaker
DOI: https://doi.org/10.3974/geodp.2022.03.20
CSTR: https://cstr.escience.org.cn/CSTR:20146.14.2022.03.20
Dataset Availability
Statement:
The dataset supporting this paper was published and is
accessible through the Digital Journal of
Global Change Data Repository at:
https://doi.org/10.3974/geodb.2022.03.01.V1 or https://cstr.escience.org.cn/CSTR:20146.11.2022.03.01.V1.
1
Introduction
The
rapid progress of information technology promotes the continuous development of
geographic science. The explosion of UAV applications
directly promotes the integration of low-altitude and near-Earth remote sensing
technology with other disciplines, forming a new application model of ??UAV+??
[1]. The full name for UAV is
??Unmanned Aerial Vehicle??, which refers to an unmanned aircraft
controlled by radio remote control equipment and self-provided program control
devices. According to the platform configuration, there are mainly fixed-wing
UAVs, multi-rotor UAVs, and unmanned helicopters. UAVs were first used in the
military field, and then demand in the civilian field increased and developed
rapidly. At present, UAVs are widely used in land surveying, plant protection
operations, disaster relief, wildlife observation,
and other fields[2]. The introduction of UAVs has provided new and
efficient technical means and innovative solutions for many industries and has
also greatly expanded the breadth and depth of UAV applications[3].
The grassland pastoral area is special in geographical research; its distinct
geographical advantages and natural conditions endow it with unique animal
husbandry resources[4]. Traditional grassland grazing is mainly
based on human labor. With the development of society, the advent of the era of
UAVs has put forward new requirements for the development of grassland animal
husbandry. Exploring the deep integration of UAVs and animal husbandry is
conducive to optimizing the grazing methods of grassland animal husbandry,
improving animal husbandry production efficiency, promoting the informed
development of animal husbandry, and realizing the real-time dynamic monitoring
of herds, which has important research significance and practical application
value.
Before the 1990s,
the grazing methods of grassland herdsmen in China were mostly on foot or
horseback; since the 1990s, motorcycles have gradually replaced horses as the
preferred auxiliary grazing tool for herdsmen[5]. Before the 1970s,
foreign herdsmen mostly used horses or cars as their main grazing tools; after
the 1970s, some large foreign pastures began to
use small helicopters to assist grazing efforts[6]. Compared with
on-foot methods, horseback riding or motorcycles greatly improved the grazing
efficiency, but it was still necessary for herdsmen to follow the herd at all
times. In addition, in areas such as alpine grasslands, highlands, mountains,
and forests, the geographical environment is complex, and it was difficult for
horses and motorcycles to follow. However, with helicopters, it was possible to
quickly follow and monitor a large area in pastoral areas regardless of the
terrain, but the cost was too high; the driver needed professional flying skills, which is not universal. In recent years,
UAV-related technologies have gradually matured, and the manufacturing cost has
dropped rapidly. As a result, UAVs have been widely used in various fields.
Some herdsmen in China and abroad have incorporated the use of UAVs to assist
in grazing[7]. UAVs are small in size, easy to carry, and highly
maneuverable. They can quickly obtain image data of ground targets from long
distances and transmit them to the receiving terminal on the ground in real time
through sensors, which is helpful for collecting herd information and herd
management. This paper systematically sorts out UAV applications in grazing and
discusses the problems and challenges of UAVs in the field of assisted grazing,
as well as the future development direction, combined with the Hulunbuir UAV
grazing livestock experiment.
2 The Application of UAV in
Animal Husbandry
2.1 Animal
Identification and Counting
Animal
identification and counting are among the most important applications of UAVs
in animal husbandry. For a long time, it has been difficult to quickly and
accurately count the number of large-scale livestock. The application of UAVs
can greatly improve the accuracy and speed of quantitative statistics[8].
UAVs equipped with high-definition resolution cameras can obtain orthophotos of
herds from low altitudes near the ground and achieve accurate animal population
counts through artificial visual interpretation or computer vision target
detection. Human visual interpretation based on UAV images has been widely used
in animal population surveys. Xu et al.
used UAVs to investigate the ecological diversity of wetland birds in the
Momoge International Nature Reserve. The direct counting method was used to
count the population of geese and ducks in the image, which provided accurate
data support for the research on the diversity status of geese and ducks and
waterbirds in the Momoge wetland and habitat selection[9]. Wang et al. replaced conventional wildlife
survey methods with UAV technology and obtained accurate and complete
information on the distribution, number, and movement trajectories of Asian
elephants through visual identification and manual counting of aerially
photographed animal images[10]. Vermeulen et al. used a UAV equipped with a high-resolution visible light and
thermal imaging camera to investigate the population of African elephants in
the southern hunting grounds of Burkina Faso, Africa, based on traditional
wildlife survey methods, with high accuracy[11].
The animal
population counting method based on manual visual interpretation has a low
degree of automation. The accuracy mainly depends on the operator??s
professional quality and subjective judgment, which is not objective and
factual. In addition, visual interpretation is difficult to process in the face
of large population counts. High-resolution aerial images have become
increasingly common worldwide in recent years, providing a data basis for
converting existing automatic or semi-automatic animal population counting to
high-precision and high-automatic target recognition and counting. In addition,
the maturity of deep learning technology has recently been applied to animal
recognition[12]. Hodgson et al.
used a deep learning network model to research seabird identification and
counting based on UAV images and compared the experimental reports of seabird
populations using traditional ground survey methods and UAV survey methods,
respectively. The results show that the statistics of the human-machine
automatic counting survey method are more accurate[13]. Linchant et al. used UAV and iMUAS software to
count the number of hippopotami in two hippopotamus parks in Galaba National
Park, Democratic Republic of Congo, and the statistical results were very close
to the true value provided by local staff[14]. Wu et al. used Inspire2 and the MavicPro
UAV to automatically detect the number of large herbivores in Sanjiangyuan.
After the accuracy testing method allowed for the
comparison of manual and automatic counting results, the relative average error
was 4.8, which can be realized in most cases[15]. Although the UAV-based
deep learning counting and statistical method still contain certain errors, it
can provide a great advantage in estimating large-scale populations, providing
data for ecologists to study grassland stocking statistics and wild animal
population estimates.
2.2 Livestock Positioning
The
BDS (BeiDou Navigation Satellite System), independently developed by China, is
an important national space infrastructure tool that can provide users with
high-precision positioning, navigation, and timing services. As of July 2020,
BDS-3 has been built and has begun to provide global services. After inspecting
the special terrain of Changdou village, Mao county, Aba prefecture, Sichuan
province, Li et al. proposed the use
of satellite positioning technology and UAV technology to achieve ??Beidou
grazing?? to build an ??aviation ecological pasture??[16]. In this
application, the livestock wear a special collar with a positioning function on
the neck for each herd. The Beidou positioning module and infrared temperature
measurement module are equipped in the collar to transmit position and
livestock body temperature information. The UAV flies over the pasture to
collect collar information and transmits the coordinate information to the
herdsman??s mobile phone application to form an information loop. In this way,
the herdsman can obtain real-time information on the herd??s location from a
long distance. Once the herd or individual deviates from the range of the
pasture, the herdsman can drive the UAV to drive it on the spot. The
positioning accuracy of the Beidou system can reach 1.2 m, and the speed
measurement accuracy can reach an accuracy of 0.2 m/s, which fully meets the
requirements of herdsmen to control the herd. An ??Aviation Ecological Ranch??
simplifies the herdsman??s grazing process. Herdsmen do not need to go over the
mountains to find the herd. For individual livestock that cross the border, the
location information of the individual can be transmitted to the UAV. After the
UAV finds the individual, it can be manually controlled to drive away, which
improves the grazing efficiency. Wu, Wanquan, a villager in Songdou village,
used the Beidou grazing system to perform unmanned management of 20 cattle, and
the grazing and driving effect was excellent[16].
2.3 Livestock Drive
In European countries such as the United Kingdom and the
Netherlands, herders use UAVs for herd management, e.g., to drive grazing. New
Zealand, known as the ??nation of sheep??, is setting off a new wave of UAV
herding. The traditional way of grazing in New Zealand is large-scale grazing
in the wild. The sheep move freely in the Southern Alps most of the year. In
autumn, the herds that roam around the extensive pasture will be driven back to the gentle and warm low-altitude grasslands. However, driving the
herd is often difficult. The herd moves freely for a long time, and their
location is scattered; the grassland is vast, the pasture is wide, the terrain
is complex, there are many mountains and ravines, and the efficiency of a
manual search is low. In addition, herdsmen in New Zealand tend to be large in
size, and it is very difficult for herdsmen to drive a nearly
1,000-kilometer-long flock under complex terrain. The local traditional driving
method is to take the shepherd dog to the top of the mountain by helicopter and
search down from the top to drive it away, which is time-consuming and labor-intensive.
The investment in a UAV weakens the intensity of this work. With the help of
the high-altitude perspective of a UAV, herdsmen can quickly locate the flock,
and use the UAV to guide the direction of movement of the sheep in different
flight attitudes, thereby replacing the herdsmen to drive them out in person,
greatly reducing the herd search time.
New Zealand
herdsman Tony Buchanan owns 5,210 sheep. He has a large herd and it is time-consuming
and laborious to drive manually. He often uses the DJI Phantom 4 RKT UAV to
assist in grazing. Tony Buchanan controlled the flying height of the UAV at
5–10 m when driving, and used the noise from the propeller to interfere with
the movement of the sheep. In addition, the shepherd dog was used to drive it
away, forming a new grazing method that combines UAV and shepherd dogs[17].
The battery life of a single flight of the UAV is about 30 minutes. After
returning to the flight with a low battery, you can return to the home point
and work again. With the help of the aerial images collected by the onboard
camera, locating the flock and looking down on the flock is very convenient.
The ability to locate the herd shortens the grazing time from 5 hours to around
2 hours.
Brett Sanders, a
farmer, has more than 8,000 sheep on his ranch. He uses the MATRICE M200 UAV to
monitor and search the flock. Most of Brett Sanders?? pastures are in the
mountains. In the past, it took three hours to drive the sheep with herding
dogs, but with the assistance of the MATRICE M200, the time to drive the sheep
was shortened by 50%[17]. An Israeli farmer developed a UAV-based
autonomous grazing system with the help of a visual deep learning algorithm and
used the Mavic 2 UAV equipped with this system to autonomously identify the
cattle on the grassland using the physiological response characteristics of the
cattle to the UAV to drive away the herd. This system greatly reduces the
operating cost of the ranch and improves the efficiency of herdsmen??s wild
grazing[18]. Another New Zealand herdsman, Jason Rentoul, uses the
consumer UAV DJI Phantom4 Advance to manage cattle[19]. Jason
Rentoul made a simple transformation based on the original machine: Jason
Rentoul added an audio player to the UAV, and the UAV played the bark and the
Star Wars movie episode alternately to the flock through the UAV. After hearing
the stimulation of the noise, the herd??s instinctive fear prompts them to
quickly concentrate and run away from the sound source. The comparative
analysis of practical results shows that UAV herding is far more efficient than
herding dogs, and the driving effect of UAV is significantly better than that
of herding dogs when driving cattle, especially cattle with calves. Cattle are
more likely to be aggressive and out of control when faced with dogs, while
UAVs do not cause aggression in cattle. The specific parameters of the UAV
involved above are shown in Table 1.
Table 1 UAV partial parameter list
|
Livestock species
|
UAV
|
Control distance/m
|
Image sensor
|
Battery capacity /mAh
|
Hover accuracy
/m
|
Wheelb-ase
/mm
|
Flight time
/min
|
Source literature
|
|
Sheep
|
DJI Phantom 4 RKT
|
FCC:7000; CE:3500
SRR:4000
|
1-inch CMOS, 20
million effective pixels
|
4,920
|
V: ??0.1
H: ??0.1
|
350
|
30
|
15, 19
|
|
Sheep
|
DJI Phantom4 Advance
|
FCC:7000; CE:3500
SRR:4000
|
1-inch CMOS, 20
million effective pixels
|
5,870
|
V: ??0.1
H: ??0.3
|
350
|
30
|
15
|
|
Sheep
|
MATRICE M200
|
FCC:7000; CE:3500
SRR:4000
|
1-inch CMOS, 20
million effective pixels
|
4,280
|
V: ??0.5
H: ??1.5
|
643
|
27
|
16
|
|
Sheep
|
Mavic 2
|
FCC: 7000; CE:
4000
SRR: 4000
|
1-inch CMOS, 20
million effective pixels
|
3,850
|
V: 0.1m
H: 0.3m
|
354
|
31
|
17
|
3. Hulunbuir UAV Grazing Livestock Experiment and Discussion
The
UAV grazing experiment was conducted in the Chenbarhu Banner Ranch in Hulunbuir
City. Hulun Buir Grassland is located in the northeast of Inner Mongolia
autonomous region, on the Hulun Buir Plateau west of the Greater Khingan
Mountains. It is a world-famous plateau pasture. The aircraft used was the DJI
Phantom 4, and the experimental objects were sheep, cattle, and donkeys. This
research experiment tested the grazing of DJI Phantom 4 on different livestock
at different flight heights using different approaches (from the edge of a
group or individual, approaching back and forth) and driving means (the UAV
itself and its noise, shouting through a megaphone). From August 15, 2020 to
August 31, 2020, a total of 24 UAV grazing experiments were carried out under
the conditions of good weather and in a grassland environment. These were recorded
from the perspective of an aerial UAV and ground mobile phones. The Hulunbuir
UAV grazing livestock experimental dataset was obtained upon completion of the
experimental process. The effects of UAV grazing are discussed separately by
herd type.
3.1 Aircraft and Megaphones
The
UAV product used in the experiment is the DJI Phantom
4, with a mass of 1,380 g, a battery capacity of 5,870 mAh, a maximum ascent
speed of about 6 m/s, and a hovering accuracy of 0.1 m in the vertical
direction and 0.3 m in the horizontal direction. The maximum communication
distance is about 5,000 m, and the flight time is 30 minutes. In addition, the
UAV has three innovative functions of obstacle perception, intelligent
following and pointing flight, which can provide important help in the grazing
process. The UAV microphone used in the experiment is adapted to the DJI
Phantom 4, and the installation method is bundled installation. The
megaphone adopts digitally encrypted transmission without interference. The
mass of the airborne end is about 115 g, with low noise and high voice
recognition. The weight of the megaphone is within the onboard carrying
capacity of the UAV and does not interfere with the normal operation of the UAV.
The main parameters
of the aircraft are shown in Table 2, and the main parameters of the high-altitude
megaphone are shown in Table 3.
Table 2 List of some parameters of
UAV used in the experiment
|
Product name
|
Control distance /m
|
Image
sensor
|
Battery capacity /mAh
|
Hover
accuracy
/m
|
Product mass
/g
|
Wheelbase /mm
|
Flight time /min
|
Maximum wind speedm/s
|
Working temperature (ºC)
|
|
DJI Phantom 4
|
FCC: 5,000
CE: 3,500
|
1-inch CMOS, 2 million effective pixels
|
5,870
|
Vertical:??0.1
Horizontal:??0.3
|
1,380
|
350
|
30
|
10
|
0–40
|
Table 3
The parameter list of the pager used in the experiment
|
Product
name
|
Sound transmission distance /km
|
Transmit power /w
|
Radio frequency /MHz
|
Volume /cm3
|
Mass /g
|
SPL
/dB
|
Charging time/h
|
Battery life/h
|
Waterproof level
|
|
UAV megaphone
|
5–10
|
5
|
433
|
7??5.5??5.5
|
118
|
125–140
|
2
|
4
|
IPx 4
|
3.2 UAV Herding Sheep
UAVs are used to drive the flock from the center of the flock, the
tail of the flock, and both sides of the flock along the direction of movement
of the flock or perpendicular to the direction of movement of the flock. An
unloaded UAV and a UAV equipped with high-altitude megaphones were used to
carry out 2–3 sheep herding experiments in different driving positions, for a
total of 17 times. The experiments were divided into eight groups and judged
the effect of UAV herding from three aspects: the reaction time of the herd,
the movement state of the herd, and the accuracy of the movement direction of
the herd. The herd reaction time refers to
the time from when the UAV starts to drive the herd to the time when the herd
responds; the movement state of the herd is the movement speed of the herd and
the dispersion of the herd during the driving process of the UAV; the movement
direction of the herd is assessed according to whether the herd is moving in
the direction of the target drive. In the shepherd experiment, the UAV chased
the sheep at a height of 20 m and adjusted to the experimental flight height
after reaching the driving position. During the driving process, the flying
speed and direction of the UAV are adjusted in real time according to the movement
state of the flock. The driving process and effects of the UAV herding
experiment are shown in Table 4 and Figure 1. Each experiment lasts about
fifteen to twenty minutes.
According
to the analysis of the experimental results, the effect of the UAV on the sides
and tail of the flock is better than that in the center of the flock. The
shepherd effect of the UAV equipped with a megaphone is better than that of the
UAV without a megaphone. Within the transmission range of the UAV noise and the
sound of the megaphone, the difference of the UAV flying height on the flock
driving effect is not obvious.
Sheep are docile, timid,
and sensitive to sudden changes in the external environment. When the UAV flies
to the center of the flock at a height of about 16 m above the flock, they will
slowly scatter around with the location of the UAV as the center, and the
direction of movement is not clear. After about 30 s, the flock bypassed the
UAV and regrouped. When the UAV, without a megaphone, approached from the rear
of the herd to drive them away, the sheep quickly gathered and moved forward
slowly in the direction away from the UAV. The UAV was manipulated to follow
the sheep, and when the UAV approached the sheep again from the tail, the flock
accelerated and continued to move away from the UAV. When the UAV equipped with
the high-altitude megaphone approaches the flock from the tail, the herdsmen
shouted to the flock through the walkie-talkie to assist the UAV upon diving to
drive the flock. The flock quickly gathered, moved faster, and had a shorter
reaction time. In the two shepherd experiments in which the herd was driven
from the tail, the sheep moved quickly and accurately in the direction of the
UAV, and the movement of the sheep was stable. When the UAV, without a
megaphone, swooped in and drove from both sides of the flock in the direction
of the flock??s movement, the flock quickly moved away from the UAV in the
direction perpendicular to the movement of the UAV, and the overall speed of
the flock was uneven. Specifically, the movement speed of the flock farther
away from the UAV is significantly slower than that of the sheep close to the
UAV, the movement state is chaotic, and its direction is unclear. When the UAV
equipped with high-altitude megaphones dived in from both sides of the flock in
their direction of movement and perpendicular to their direction of movement,
the herdsmen continued to shout to the flock. The flock quickly gathered
together after hearing the sound and moved quickly and steadily in the
direction away from the UAV. After observing the eight groups of sheep herding
experiments, it can
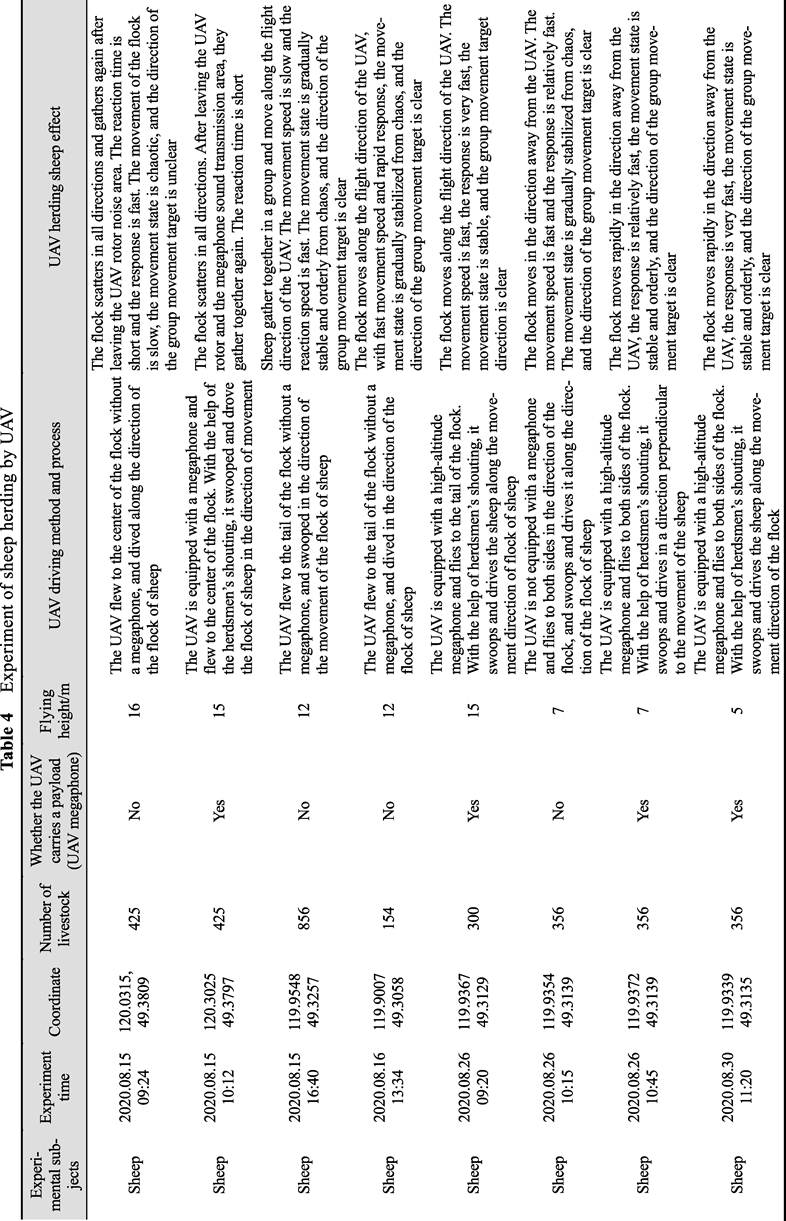
Figure 1 Experimental
results of UAV shepherding
be seen that the sheep are sensitive to the herdsmen??s
voices. When listening to the shouts, the sheep will quickly gather together
and move in the target direction under the interference of the UAV. In
addition, there is an adaptation process for the sheep to be driven by UAV: the
sheep are afraid of UAV at the beginning, and when the UAV starts to approach,
the sheep will respond quickly and run, resulting in a movement state that is
relatively chaotic. After the UAV hovers over the flock for a while, the flock
becomes familiar with the sound of the UAV.
At this time, the tail of the flock is slightly driven to move towards a
specific target direction. The UAV herding experiments were carried out in
three different locations. In the UAV driving experiment carried out in three
different positions of the flock, except that the movement of the flock would
be chaotic when the flock was driven at the center of the flock, the flock was
successfully driven to the water tank near the flock in other positions.
3.3 UAV Herding Cattle
A
total of six experiments were carried out using the UAV with and without high-altitude
megaphones to drive the cattle in the center and tail of the herd,
respectively. The cattle-herding effect of the UAV is judged from three
aspects: the reaction time of the herd, the movement state of the herd, and the
accuracy of the direction of the movement of the herd. During the driving
process, the flight altitude, speed, and flight direction of the UAV were
adjusted in real time according to the movement state of the herd. The driving
process and effect of the UAV cattle herding experiment are shown in Table 5
and Figure 2.
According to the
experimental analysis, the driving effect of the UAV at the tail of the herd is
better than that at the center of the herd; the cattle grazing effect of the
UAV equipped with the high-altitude microphone is better
than that of the UAV without the high-altitude microphone.
The
herd has a weak tendency to live in groups, and the stations are scattered when
feeding. When using a UAV to drive the herd, it is necessary to drive out the
outliers individually. When the UAV flies to the center of the herd at a flying
height of 10 m, the individuals close to the UAV stop moving and watch the UAV;
control the UAV to dive down and drive away, and the cattle closer to the UAV
will move away from the UAV. The direction of the man-machine moves, but the
movement state of the individuals far away from the UAV does not change. When
the UAV without a megaphone flies to the tail of the cattle herd at a flight
height of 2 m and dives in to drive them, the cattle at the tail slowly retreat
in the direction of the UAV??s flight, and the cattle in front are also affected
by the backward movement of the cattle at the rear. When the UAV moves in the
direction of flight, the herd moves slowly towards the driving direction of the
UAV; when the herd leaves the noise range of the UAV for a certain distance,
the herd decelerates. At this time, the UAV is driven to continue diving at the
tail of the herd to drive the cattle. The human-machine drive direction moves
slowly. When the UAV equipped with the high-altitude megaphone drives the
cattle at the tail of the herd at a flying height of 2 m, the movement of the
cattle is more stable. The herdsmen shout to the cattle through the
walkie-talkie, and the UAV is able to drive the direction of movement. After
comparing the four groups of UAV cattle herding experiments, it was found that
the cattle were in the best movement state when the UAV drove the herd in the
evening. Herdsmen usually drive the cattle back to the bullpen around 6 pm. The
cattle have formed a biological clock, and at this time, the drone will move
towards the target direction after driving the herd for a short time.
Table 5
Experiment of herding cattle with UAV
|
Experi-
mental subjects
|
Experi-
ment time
|
Coordinate
|
Number of livestock
|
Whether the UAV carries
a payload (UAV megaphone)
|
Flying height /m
|
UAV driving method and
process
|
UAV herding cattle
effect
|
|
Cattle
|
2020.08.24
15:15
|
119.946,2
49.331,7
|
17
|
No
|
10
|
The UAV flew to the
center of the cattle without a megaphone, and dived in the direction of the
target drive
|
The cattle close to the UAV stop moving and
watch the UAV, and move slowly away from the UAV when the UAV dives down; the
cat
tle response time is long, the move
ment state is chaotic, and the direction of the moving target is not clear
|
|
Cattle
|
2020.08.24
16:07
|
119.9414
49.3243
|
16
|
Yes
|
10
|
The UAV is equipped
with a megaphone to fly to the center of the cattle, and swoops to drive the
cattle away with the help of cattlesmen??s shouting
|
Some cattle individuals stopped exercising
to watch the UAV, while the rest of the cattle moved slowly, with long
reaction time, chaotic and irregular movement status, and unclear movement
target direction
|
|
Cattle
|
2020.08.25
18:08
|
119.8926
49.3095
|
50
|
No
|
2
|
The UAV flew to the
tail of the cattle without a megaphone and dived in the direction of the
cattle to drive it away
|
The individuals at the tail of the cattle
move away from the UAV, with slow movement speed and unresponsive response.
The overall movement of the cattle is stable and the movement target is clear
|
|
Cattle
|
2020.08.27
18:30
|
119.8934
49.3100
|
50
|
Yes
|
2
|
The UAV was equipped with a megaphone and flew to the tail of the cattle in the bullpen.
With the help of the herds men??s shou-
ting, it dived to drive
the cattle out of the bullpen
|
Some individuals at the tail of the cattle
watch the UAV. When the UAV dives, the cattle moves away from the UAV. The
movement is slow, the response is slow, the movement state is stable, and the
moving target direction is clear
|
|
Cattle
|
2020.08.31
09:12
|
119.8573
49.3015
|
57
|
No
|
5
|
The UAV flew to the
tail of the cattle without a meg
aphone, and dived along the target direction; flew to the vicinity of the
individual separated from the
gr
oup, and dived and drove along the target direction
|
The tail herd moves towards the driving
direction of the UAV, the movement speed was slow, the reaction time was
long, and the movement state was chaotic;
when a single individual drives
away, the individual responds slowly,
moves slowly, and the movement
state is stable
|
|
Cattle
|
2020.08 31
17:50
|
119.9409
49.3151
|
23
|
Yes
|
6
|
The UAV flew to the
tail of the cattle without a meg
aphone, and dived along the target direction; flew to the vicinity of the
individual separated from the group,
and dived and drove along the target
direction
|
The tail cattle moves in the direction of
unmanned driving, the movement speed is slow, the response is slow, and the
movement state is stable; when a single individual drives, the individual
responds quickly, moves fast, and the movement state is stable
|

Figure 2 Experimental results of
cattle herding by UAV
3.4 UAV Herding Donkey
A
total of three groups of experiments were carried out by using a UAV with and
without a megaphone and a UAV with a megaphone to drive the donkeys at the
center and the tail of the donkeys, respectively. The effect of UAV herding is
judged from three aspects: the reaction time of the donkey group, the movement
state of the donkey group, and the accuracy of the movement direction of the
donkey group. During the driving process, the flight speed and flight direction
of the UAV are adjusted in real time according to the movement state of the
donkey group. Table 6 and Figure 3 show the driving process and effect of the
UAV donkey herding experiment.
Table 6 Experiment of
using UAV for herding donkey
|
Experi-
mental subjects
|
Experiment time
|
Coordi
nate
|
Number of livestock
|
Whether the UAV carries
a payload (UAV megaphone)
|
Flying height /m
|
UAV driving method and
process
|
UAV herding donkey
effect
|
|
Donkey
|
2020.08.31 14:48
|
119.9383,
49.3153
|
15
|
No
|
5.5
|
The UAV flew to the
center of the group of donkeys and dived in the direction of the movement of
the female donkey in the group
|
When the UAV flies to the center of the
donkey group, the donkeys disperse; when the UAV dives, the female donkey in
the donkey group quickly moves closer and moves quickly along the flight
direction of the UAV. The movement state is stable and orderly, and the group
target direction clear
|
|
Donkey
|
2020.08.31
15:10
|
119.9372
49.3139
|
15
|
No
|
6
|
The UAV flew to the
tail of the group of donkeys and swooped in the direction of the group??s
movement
|
A few individuals at the tail looked at the
UAV, quickly approached the female donkey when the UAV dived, and moved
quickly along the flight direction of the UAV. The movement state was stable
and orderly, and the group target direction was clear
|
|
Donkey
|
2020.08.31 15:30
|
119.9339
49.3135
|
15
|
Yes
|
5
|
The UAV is equipped
with a high-altitude megaphone to fly to the tail of the donkey group, and
with the help of the herdsmen??s shouting, it swoops and drives it along the
movement direction of the donkey group
|
When the herdsmen shouted, the donkeys
stared at the UAV, quickly approached when the UAV swooped, and quickly moved
in the direction of the UAV's flight. The movement state was stable and
orderly, and the group??s target direction was clear
|

Figure 3 Experimental effect of UAV
donkey grazing
Donkeys are
docile, timid, sensitive to changes in the external environment, and run fast.
When the UAV without a megaphone and the UAV with a megaphone swooped down to
drive the donkeys, the donkeys quickly moved closer to the female donkey, and
moved quickly in the direction of the UAV to drive along with the female
donkey. In the third donkey herding experiment, when the UAV flew to the tail
of the donkey group, individual individuals in the tail stopped and watched the
UAV. After the herdsman shouted to the donkey group with the walkie-talkie to
drive them away, the stray individuals quickly turned around and ran towards
the female donkey. In the three donkey herding experiments, the donkeys were
successfully driven to the water tank near by the animal pen.
3.5 Comparison of Grazing Effects of UAV for
Different Livestock Species
Comparing the experiments of the UAV herding sheep, cattle,
and donkeys, we find that the UAV grazing effect is good, and the effect of UAV
driving sheep and donkey herds is better than that of driving cattle herds.
Sheep and donkeys have a strong tendency to live in groups, and the actions of
individuals are more easily affected by group actions, so the UAV can drive the
entire herd by controlling key individuals in the herd. The order of the herd??s
response to external noise, ordered from strong to weak, are sheep, donkeys,
and cattle. The herdsmen??s shouting sounds can significantly stimulate and
affect the actions of the sheep and donkeys, while the cattle herds have a
strong anti-interference ability to the sounds. In the process of shepherding,
the flock has an adaptation process to the UAV driving. During the period from
when the UAV begins to descend within the audible range of the flock, the flock
will quickly disperse towards a certain direction due to the interference of
noise, running in an uncertain direction. After the flock is familiar with the noise
of the UAV, it is best to drive the sheep from one end of the flock at a flying
height of about 15 m, and in the case of the herdsmen??s shouting assistance;
the driving effect is clearly better than the driving effect of using UAV
alone. In addition, there was no difference in the repelling effect of sheep of
different sizes. In the eight groups of experiments, the UAVs were successfully
used to drive the flocks. The stability of the herd??s movement, ordered from
stable to least stable, are donkeys, sheep, and cattle. In the process of the
UAV driving the herd, the movement of the donkeys is the most stable, and the
young donkeys always move around the female donkey; the sheep will quickly
gather together and move in a certain direction after being disturbed by the external sound, and occasionally run away.
Their scattering is divided into two parts, and after a little driving, they
will quickly gather again. When the cattle are being driven away, some
individuals move slowly, and the overall position is relatively scattered, and
the movement speed is not coordinated. To ensure the movement of the cattle in
the driving direction, the assistance of herdsmen or shepherd dogs is often
needed.
The
donkey herding experiment is special. First, there are few donkey herders in
the Hulunbuir grassland. Second, the donkey group of the experimental subjects
is a special group composed of female donkeys and their cubs. The behavior of
this group is greatly affected by the actions of the female donkeys. After the
experiments, it was found that the female donkey is sensitive to the UAV and
herdsmen??s voices. During the driving process, the cubs moved around the female
donkey. The movement status and direction of the donkeys performed well with
the help of the herdsmen??s shouting. The response of the herd to the noise of
the UAV is weak. When using the UAV to drive the herd, the UAV??s trajectory
needs to be adjusted to be about 2–3 m away from the herd. Finally, in the
process of expulsion, it is necessary to adjust the UAV??s position in time
according to the individual response.
4 Issues and Challenges of UAV Grazing Applications
UAVs are highly agile in the air, and UAVs with high-resolution
cameras can help herders understand the conditions of their herds in pastoral
areas. There have been many cases of using UAVs for grazing, in China and
abroad, and their effect on grazing is positive. However, some problems and
challenges remain in the application of UAV grazing in grasslands.
(1)
The degree of automation of UAV grazing in grassland pastures is insufficient.
UAVs are easy to operate and flexible to use, but in the grazing process,
herders still need to actively control the UAV to find herds, which is highly
dependent on herdsmen. Scholars have developed target recognition and tracking
algorithms based on the UAV operating platform. Still, the tracking system has
not been integrated and applied, and the reliability of automatic tracking and
recognition has yet to be tested.
(2)
The battery life of UAVs needs to be improved. Due to the limitation of the
maximum weight of the UAV itself, the specifications of battery are limited to
a certain range. Taking the DJI UAV as an example, the maximum endurance time
of a no-load take-off is about 30 minutes. At present, the battery charging
time for a UAV on the market is generally long. To ensure an ample operating
time for the UAV, it is necessary to carry multiple spare batteries. In
addition, when the pastoral area is large, it is necessary to ride a motorcycle
to the driving place. The problem of optimizing the battery solution and
prolonging the single operation time of the UAV needs to be urgently addressed.
(3)
The accuracy and stability of the UAV positioning system are insufficient. At
present, UAV positioning and navigation mainly adopt GPS and Beidou dual-star
mode. Major UAV manufacturers have optimized the cruise algorithm based on the
navigation satellite positioning system so that the positioning accuracy can
reach the meter level. However, when the UAV operates in high latitudes, it is
easily affected by objective conditions such as terrain and weather. The
interference of the navigation satellite signal causes the UAV to deviate from
the predetermined orbit. The problem of insufficient accuracy and stability
needs to be resolved.
(4)
Communication capabilities such as UAV image transmission need to be improved.
The UAV and the ground control terminal mainly carry out image transmission
(image transmission), data transmission (data transmission), and remote control
interaction. Most UAVs on the market have a maximum signal transmission
distance of 4–7 km without signal occlusion. However, in many complex
situations, the actual signal transmission distance cannot reach this standard
and cannot meet the needs of long-distance grazing. In addition, the current
network base station cannot completely cover the entire flight airspace, and
the long-distance grazing of the UAV is prone to the loss of the image
transmission signal and the delay of the remote control of the UAV on the
ground. Enhancing the data transmission capability and signal transmission
capability of UAVs is a key problem that limits UAV grazing.
(5)
The massive geographic data byproducts generated in the UAV grazing process are
not fully utilized. A UAV equipped with high-resolution optical cameras is an
important tool for collecting near-surface topographic data in multiple
disciplines such as geography, grassland science, and ecology. A UAV will
generate a large amount of surface image data in the grazing and driving
processes, herd searching, and herd monitoring. These data include not only
attribute information such as geographic location but also information such as
surface morphology and object type. These massive images can be systematically
organized and filtered and can be used as a data source for grassland status
assessment and detection in pastoral areas, which is of great significance. At
present, the massive image information produced by the UAV grazing process
lacks effective management methods, and how to organize and establish an image
database remains to be studied.
5 Prospect
UAVs are an important tool to automate grazing, and they
are playing an increasingly important role in grassland grazing management.
This paper introduces the related technologies and development status of UAV
grazing, summarizes the application of UAV in grazing at home and abroad, and
analyzes the effect and feasibility of UAV grazing in combination with the
Hulunbuir UAV grazing livestock experiment. In recent years, researchers have
explored a series of innovative technologies to meet the high demands of UAV
hardware in complex scenarios. With the in-depth research and promotion of new
technologies such as artificial intelligence, new batteries, and 5G
communications, the application of UAVs in grassland grazing management will
enter a new development stage, and the realization of highly automated UAV
grazing is just around the corner.
(1)
Artificial intelligence helps UAV grazing to develop towards high automation.
In recent years, the application and practice of target tracking algorithms
have gradually matured, and a large number of studies have shown the efficiency
and feasibility of convolutional neural networks in the field of image
recognition and target tracking. UAV technology research with an intelligent
tracking module will be a bright spot.
(2)
The livestock monitoring system promotes the improvement of the soft power of
UAV grazing. Domestic and foreign researchers have done much research
concerning the identification of ground wildlife based on UAV detection and
have achieved fruitful results. Wang et
al. developed a real-time herd identification system based on the UAV
platform, which realized online identification, counting, and weight estimation
of livestock with an accuracy of over 90%. For the identification of dense
herds, the error is relatively large. In the future, by enriching the data of
the sample database and improving the model, it will be more accurate to
realize the low-error identification of livestock and assist herdsmen in
realizing the automatic management of livestock.
(3)
The new battery material achieves the ultra-long battery life required by the
UAV. In so far as the existing small fixed-wing and multi-rotor UAVs on the
market are concerned, the power sources are mainly lithium-ion power batteries,
and the bipolar materials of the batteries play a decisive role in performance
and cost. Silicon carbon composite material is a new type of electrode
material, and major lithium battery manufacturers have begun to study it. Some
manufacturers try to solve the problem of volume expansion, strong liquid
absorption ability, and the cycle time of silicon-carbon composite material
during charging and discharging through silicon-carbon coating and doping.
Regarding the problem of poor longevity, some achievements have been made. As a
future negative electrode material, the theoretical gram capacity of silicon-carbon
composite material is about 4200 mAh/g, which is more than 10 times higher than
the 372 mAh/g of a negative graphite electrode. This technological advance will
extend the UAVs flight time. In addition, the application of nanotubes and
aerogel batteries will also greatly improve the long-term operation
capabilities of UAVs.
(4)
The 5G communication module assists the UAV in being the ??eye of the sky?? for
herdsmen. The biggest feature of 5G communication is its large bandwidth. In
theory, the bandwidth of 5G can reach more than 20 Gbps. In terms of reducing
signal interference, 5G can use the laying of large-scale antennas and narrow
beams to serve users, thereby reducing mutual interference in the user area and
providing a reliable guarantee for low-altitude communication of UAV. The 5G
ubiquitous network can improve the flight distance and positioning accuracy and
solve the limitation of UAV control distance. In addition, the 5G network has
the characteristics of ultra-low latency and can provide millisecond-level
transmission delay, which means that a UAV with 5G communication capabilities
can respond faster to ground control commands and can avoid complex terrain
during grazing. The barrier capability is further improved.
(5)
A geospatial data cloud master helps to build a big data system for UAV
grassland monitoring. A UAV equipped with high-resolution visible light sensors
can spontaneously obtain ground orthophotos during grazing. After many
applications in grassland animal husbandry, a UAV will produce a large amount
of grassland image data. These massive data are arranged in a certain format
and organized way before being uploaded to the cloud synchronously, which can
form the grassland big data based on the geospatial data cloud. After image
stitching, data information mining, etc., a series of multi-period grassland
near-ground remote sensing images are generated.
UAVs
can establish strong support for grassland monitoring and sustainable
development of animal husbandry and, at the same time, assist the government in
formulating grassland development policies.
(6)
The ground monitoring system is combined with the UAV to build an air-ground
integrated animal husbandry detection platform. The ground monitoring system
(such as a dome camera) has the function of automatic tracking of regional
targets and accurate tracking of locking, which can realize large-scale chain
monitoring and has great application potential in grassland pastlure management
and grazing. Compared with a UAV, the high-definition camera monitoring system
has the advantages of all-weather, all-day, long-term fixed-point monitoring,
etc., which can make up for the lack of remote monitoring of a UAV to a certain
extent. Combining the UAV with the ground monitoring system can achieve
regional management of the pastoral area, monitor the movement status of the
herd through the camera, and use the UAV to monitor or drive some ??problem??
individuals alone, forming a dynamic and static combination of an air-ground
integrated animal husbandry detection system.
Author Contributions
Wang, D. L. designed the algorithms of dataset and
organized UAV grazing experiments. Zhang, A. Y. contributed to the data
processing and wrote the data paper.
Conflicts
of Interest
The
authors declare no conflicts of interest.
References
[1]
Gao, J. T.,
Sun, F. D., H, F., et al. Application
and evaluation of UAV remote sensing technology in survey and monitoring of
grassland flora and fauna [J]. Journal of
Grassland, 2021, 29(1): 1–9.
[2]
Zhang, Y.
X., Zeng, Q. D., Zhang, W. Review of UAV development [J]. Henan Science and Technology, 2017(9): 58–59.
[3]
Zhang, W.
H. Specific application and prospect analysis of civil unmanned aerial vehicle
technology in Zhangweinan canal basin [J]. Haihe
Water Conservancy, 2018(4): 65–67.
[4]
Chen, Y.
F., Liu, Y. S., Yan, J. P. On animal husbandry and rural development in
grassland and pastoral areas in my country [J]. Advances in Geographical Sciences, 2005(3): 17–24.
[5]
Chen, Y.
Economic development brings changes: motorcycles change the lives of Tibetans
in Qinghai [N/OL]. Global Times, 2016.
2006-07-28.
[6]
Li, R. J.
Grazing by helicopter: I am a ??beautiful cattleboy?? in Australia [J]. The Road to Success, 2012(4): 32–34..
[7]
Liao, X.
H., Zhou, C. H., Su, F. Z., et al.
The era of UAV remote sensing crowd creation [J]. Journal of Earth Information Science, 2016, 18(11): 1439–1447.
[8]
Li, Z. M.,
Fu, F. F., Xu, X. X., et al.
Development of a statistical system for animal and plant populations based on
UAV [J]. Electronic World, 2019(13):
15–17.
[9]
Xu, Y. X.
Investigation and research on great bustards and geese and ducks based on UAV
technology [D]. Changchun: Northeast Normal University, 2020.
[10]
Wang, F.,
Zheng, X., Ma, J., et al. Application
of UAV technology in the investigation and monitoring of wild Asian elephants
in China [J]. Forestry Construction,
2019(6): 38–44.
[11]
Vermeulen,
C., Lejeune, P., Lisein, J., et al.
Unmanned aerial survey of elephants [J]. PLoS
ONE, 2013, 8(2): e54700.
[12]
Luo, W.,
Shao Q. Q., Wang, D. L., et al.
Identification method of large wild herbivores based on object-oriented
classification—taking the Sanjiangyuan area of Qinghai as an example [J]. Journal of Wildlife, 2017, 38(4):
561–564.
[13]
Hodgson, J.
C., Mott, R., Baylis, S. M., et al.
UAV count wildlife more accurately and precisely than humans [J]. Methods Ecol Evolt, 2018, 9: 1160–1167.
[14]
Linchant, J., Lhoest, S.,
Quevauvillers, S., et al. UAS imagery
reveals new survey opportunities for counting hippos [J]. PLoS ONE, 2018, 13(11): e0206413.
[15]
Wu, F. M.,
Zhu, W. W., Wu, B. F., et al.
Automatic monitoring method of large herbivores in Sanjiangyuan by unmanned
aerial vehicle [J]. Journal of Veterinary
Medicine, 2019, 39(4): 450–457.
[16]
Li, X. P.
??UAV herding cattle?? makes agriculture and animal husbandry at the forefront of
fashion [N/OL]. Agricultural Science and Technology, 2020. 2020-01-06.
http://www.eb.nkb.com.cn/nykjb/20200701 /html/page_ 07_content_001.html.
[17]
Carrick.
UAV herding in Zeeland: ??Air Sheepdog?? [N/OL]. Asia Times, 2020. 2020-01-06.
http://atimescn. com/TechnologyView-11547.html.
[18]
Wang, C.
British ranchers use drones to herd sheep [N/OL]. NetEase News, 2016. 2016-03-15. https://www. 163.com/tech/article/BI76BMAT00094P0U.html.
[19]
Sensv. UAV
herding sheep, AI pig raising, this may be the future of agriculture [N/OL].
World Wide Web. 2019. 2015-04-08. https://uav.huanqiu.com/article/3wRvosxFoLA.